Back: 研究内容
更新日:2006.4.01
自立型2脚ロボットMARI-3による1脚跳躍実験
研究概要
人間型2脚ロボットを走行させるための基礎研究として、1脚跳躍の制御則を考えた。本研究室では質点とバネで構成されるモデルによる跳躍制御の提案を行ってきた。質点とバネによる運動は正弦波で与えられるため、ロボットの重心の高さを正弦波で振る事を考えた。
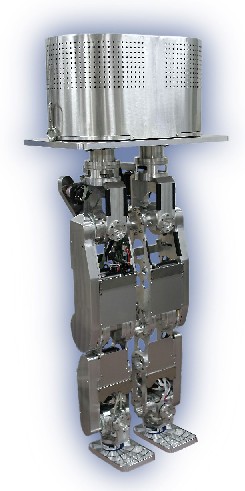
MARI-3
- 片脚6自由度×2脚+腰YAW軸1関節=13自由度
- 軽量、高出力(38kg,1.8kW)
- 制御部は胴体に配置
- 電源のみの供給で動作
- 機構部は主にアルミ合金
- ジャイロセンサ、加速度センサ、6軸力/トルクセンサ
- ロボットネットワークによる配線の簡略化
開発したロボットMARI-3は自由度が13ある。そのため、13未満の適当な拘束とそれに対応するヤコビアンの擬似逆行列を用いる事でロボットの全重心の位置および必要な拘束から、関節角度を導出できる。本実験では、「支持足の真上に重心を置き、支持足から重心までの高さを等価バネ長で与える」、「支持脚から見た遊脚の位置を足同士が干渉しない適当な位置を取る」、「系全体の角運動量を0に保つ」、の9つの拘束を満たすような関節角度を導出した。
求められた関節角度を外乱オブザーバ付きの関節位置サーボが再生する事によりMARI-3の1脚跳躍実験に成功した。
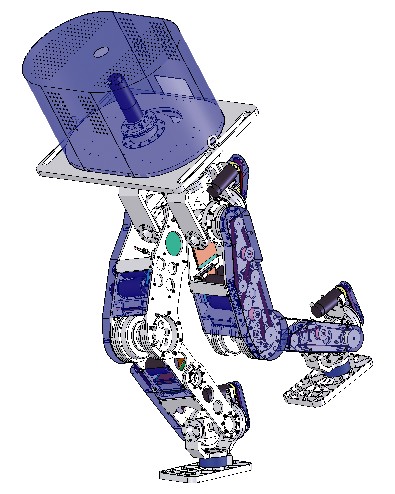
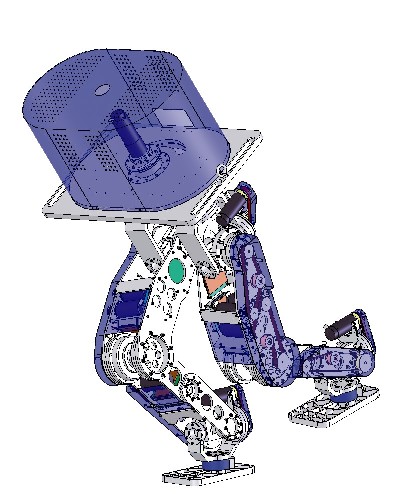 跳躍時の様子
跳躍時の様子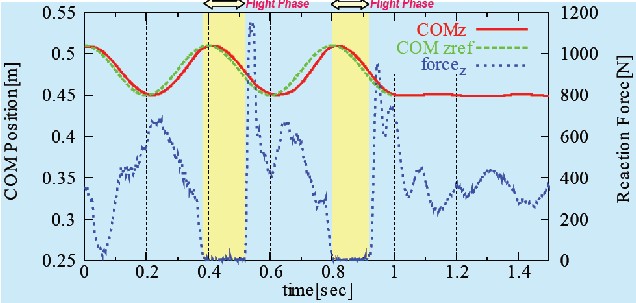
110[msec]程度の跳躍に成功!