Back: 研究内容
更新日:2006.4.01
自立型2脚ロボットMARI-3における逆キネマティクス計算の高速化
研究背景
本研究室では、高速歩行や走行を実現するために自律型二足ロボットMARI-3 を開発した。全体的に軽量化が推し進められており、マイコンにも小型且つ軽量なSH-4 マイコンを使用した。反面、従来の計算機と比較して若干計算能力が劣るため、一制御周期内に全ての計算を処理できなくなる可能性がある。特に逆運動学(逆キネマティクス)計算は1.0[msec] の周期でロボットを制御する際ボトルネックになっていると考えられる。そこで本研究では、逆キネマティクスの計算時間を低減することを目的とした。
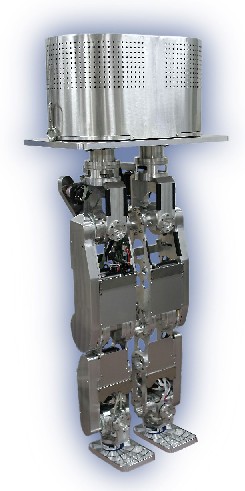
MARI-3
- 片脚6自由度×2脚+腰YAW軸1関節=13自由度
- 軽量、高出力(38kg,1.8kW)
- 制御部は胴体に配置
- 電源のみの供給で動作
- 機構部は主にアルミ合金
- ジャイロセンサ、加速度センサ、6軸力/トルクセンサ
- ロボットネットワークによる配線の簡略化
逆キネマティクスの高速化を図るために解析解法を用いた。その結果、従来本研究室で用いてきたNewton-Raphson 法に比べて最大計算時間を55 %削減することができた。そのことで、逆キネマティクスにかかる時間を1.0[msec] の制御周期の13%に留めることができた。現在、MARI-3で高速歩行を進んでいる。