Back: 研究内容
更新日:2006.4.01
1脚ジャンプロボットKen-2
研究概要
本研究室ではヒューマノイドの歩行機能に着目し、研究を行ってきた。しかし歩行速度には限界があり、2足ロボットがさらに速く移動するためには、走行動作が必要となる。
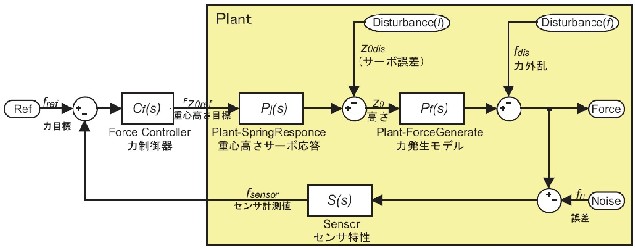
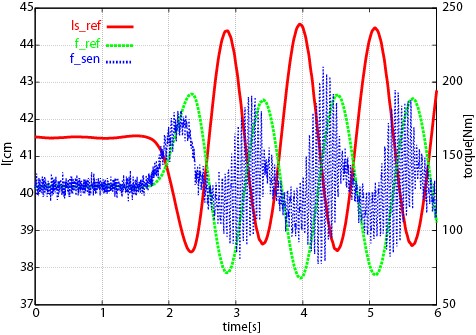
走行とは1脚での連続跳躍を交互に行っていると解釈できるため、本研究では、1脚跳躍ロボットの跳躍を目指し、跳躍制御を行うために必要となる床反力制御器について考え、その問題点を示した。また、その問題を解決するために、制御器を再設計するのに必要となるプラントを実験データより新たに求めた。

Ken-2
- 4つのリンク3関節で構成
- 重量:14.5[kg]
- 制御部は胴体に配置
- 電源のみの供給で動作
- アルミ合金とABS樹脂
- 姿勢角検出:ジャイロ;床反力:力センサ
仮想ばねの原理で重心の位置を制御することで床反力を制御