Back: 研究内容
更新日:2006.4.01
2足歩行ロボットMARI-2のビジュアル歩行
研究目的
本研究は,人間の生活している居住環境内で,2足歩行ロボットがどのように行動すれば人間と一緒に生活できるかということを研究しています.CCDカメラによる視覚,力センサによる触覚を利用して,対象物体の追従,障害物の回避,踏破などを統合的に制御することを目指しています.
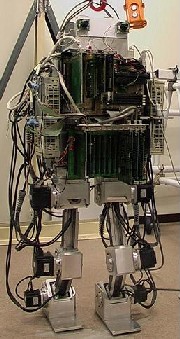
MARI-2
制御装置をすべて機体に搭載しており、外部供給電源のみで動作することができる自律型の2足歩行ロボットです。
- 全長:1.3[m] 重量:70[kg]
- 各足6軸、両足12軸、合計12個のACモータ及びエンコーダ
- RT-Linux(DOS/V PC)により全体を制御
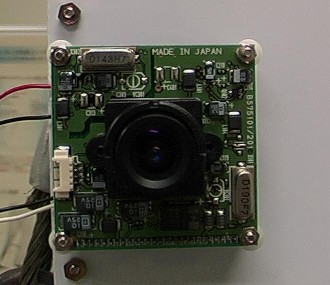
- CCDカメラ、6軸力/トルクセンサを搭載
リアルタイム画像処理による人物の抽出
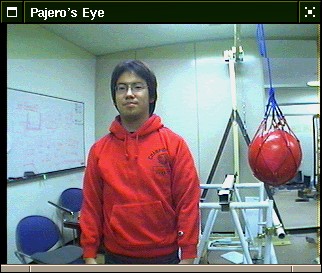
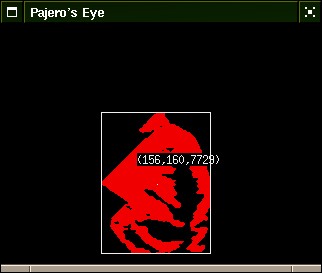
現状:動く対象物を追いかける(上下、前後、旋回)
目標:自律的な階段昇降、不整地歩行
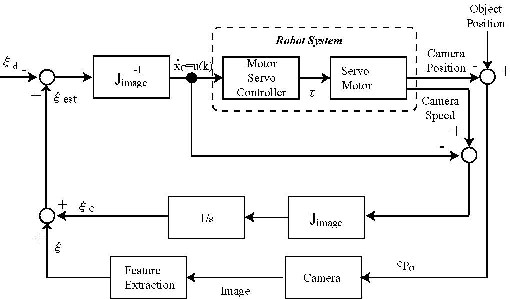
2足歩行ロボットのビジュアル歩行
歩行ロボットが移動しながらカメラで観測をすると必ず周期的な振動が発生します.その振動は制御に大きな影響を与えます.この振動を周期的な外乱として,除去することでロバストな画像観測をすることが出来ます.また,推定画像特徴量を用いて制御性能の向上が見られました.
今後はロバスト画像観測をもとにより人間らしい行動制御について研究していきます.
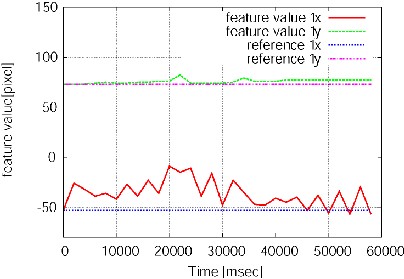
外乱抑圧なし時の歩行結果
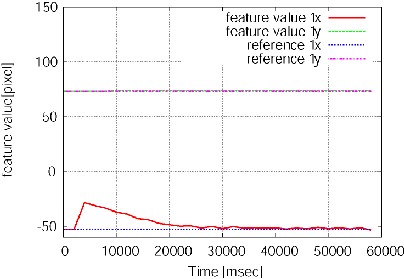 外乱抑圧ある時の歩行結果
外乱抑圧ある時の歩行結果