Back: 研究内容
更新日:2006.4.01
ROCOSを用いた一脚跳躍ロボットKEN-2の跳躍
研究概要
ROCOS (RObot COtrol Simulator) は床との衝突や摩擦を厳密に考慮した3次元ダイナミックシミュレータです。
脚式ロボットにおける移動の高速化や、跳躍、走行を目指し、さまざまなアプローチで研究を行っています。
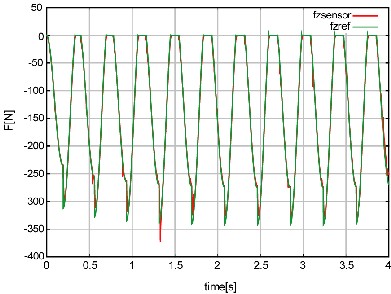
本研究ではまず、跳躍制御について脚に回転関節の無い簡単な2次元1質点1脚モデルで検証した。その後で、ロボットのシミュレーションモデルを本研究室にある3つの関節を持つ1 脚2次元跳躍ロボットKEN-2 に合わせて作成し、ROCOSを用いて、オープンループの跳躍制御で跳躍動作のシミュレーションを行った。静的力学方程式と重心ヤコビアンにより各関節のトルクへ変換を行い、足部分の重量が充分軽い時に、約10 回の跳躍が実現できた。