|
||||||||||||||||
| Back: 河村研究室 | ||||||||||||||||
|
|
||||||||||||||||
 |
||||||||||||||||
|
|
||||||||||||||||
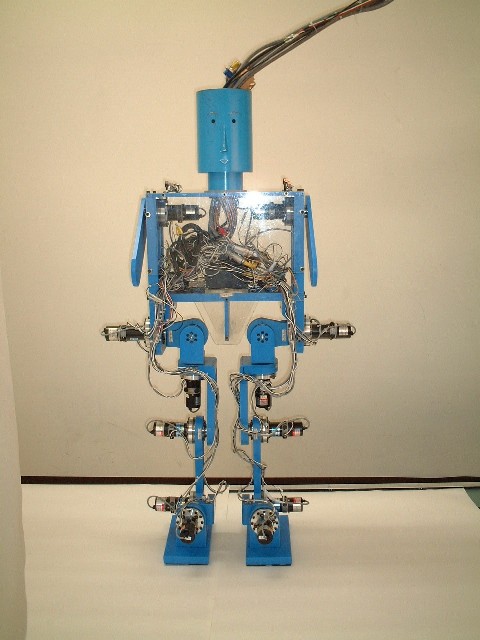
| 制御装置をすべて機体に搭載しており、外部供給電源のみで動作することができる自律型の2足歩行ロボットです。 ZMPオンライン補償による安定した歩行と、搭載したCCDカメラによる目標物へ追従するなどの環境に適応した行動をとることができます。 各種ボードを組み込むことで、機能を追加できるなどの拡張性もあります。 機体諸元:
|
||||||||||||||||
 |
||||||||||||||||
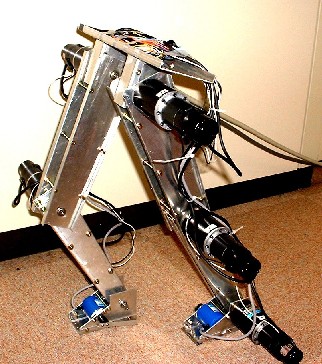
| 床との衝突や摩擦を厳密に考慮した3次元ダイナミックシミュレータです。
脚式ロボットにおける移動の高速化と安定化を目指し、さまざまなアプローチで研究を行っています。 研究題目:
|
||||||||||||||||
   感圧センサ(FSR)を使用したZMP計測ユニットです。 MARI-2、MARI-1、人間用をそれぞれ開発し、人のZMPを解析、それをロボットの歩行に活かすことができます。 現在、MARI-2にこのユニットを組み込み、ZMPをオンラインで補償し歩行を実現しています。 詳しくはこちら (English Only) |
||||||||||||||||
|
||||||||||||||||
To: 過去のロボットページ |
||||||||||||||||