|
|||||||||||||||||
| Back: Kawamura Lab | |||||||||||||||||
|
|
|||||||||||||||||
 |
|||||||||||||||||
|
|
|||||||||||||||||
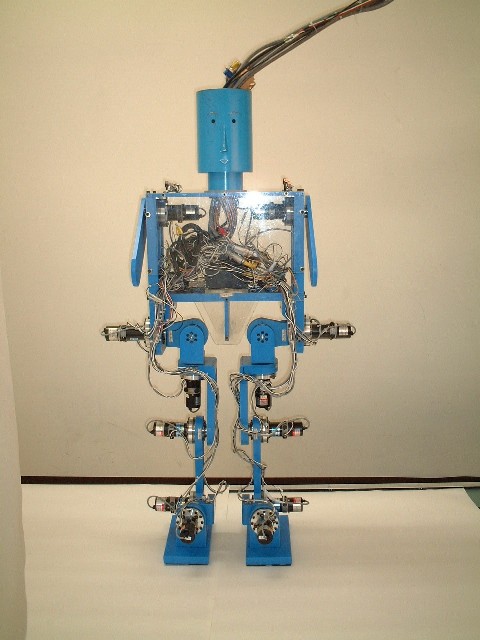
| A autonomously biped robot embedded everything except power supply. Currently two problems are focused, stable walking with on-line ZMP control and adaptive motion with visual feedback. The robot has flexible extensionality with combination of functional boards. Specification:
|
|||||||||||||||||
 |
|||||||||||||||||
|
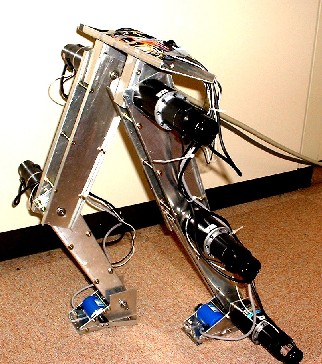
To implement fast and stable walking of legged robot, various approaches are being explored with ROCOS. Research Problems:
|
|||||||||||||||||
|
|
|||||||||||||||||
   ZMP sensing unit developed with FSR (Force Sensing Resistor). It is already used in MARI-2 and MARI-1 to implement stable walking by on-line ZMP control. It also can be used to analyze human's walking and therefore fertilize the motion of walking robot by applying the analyzed result. |
|||||||||||||||||
|
|||||||||||||||||
To: Past Robot Page (Japanese Only) |
|||||||||||||||||