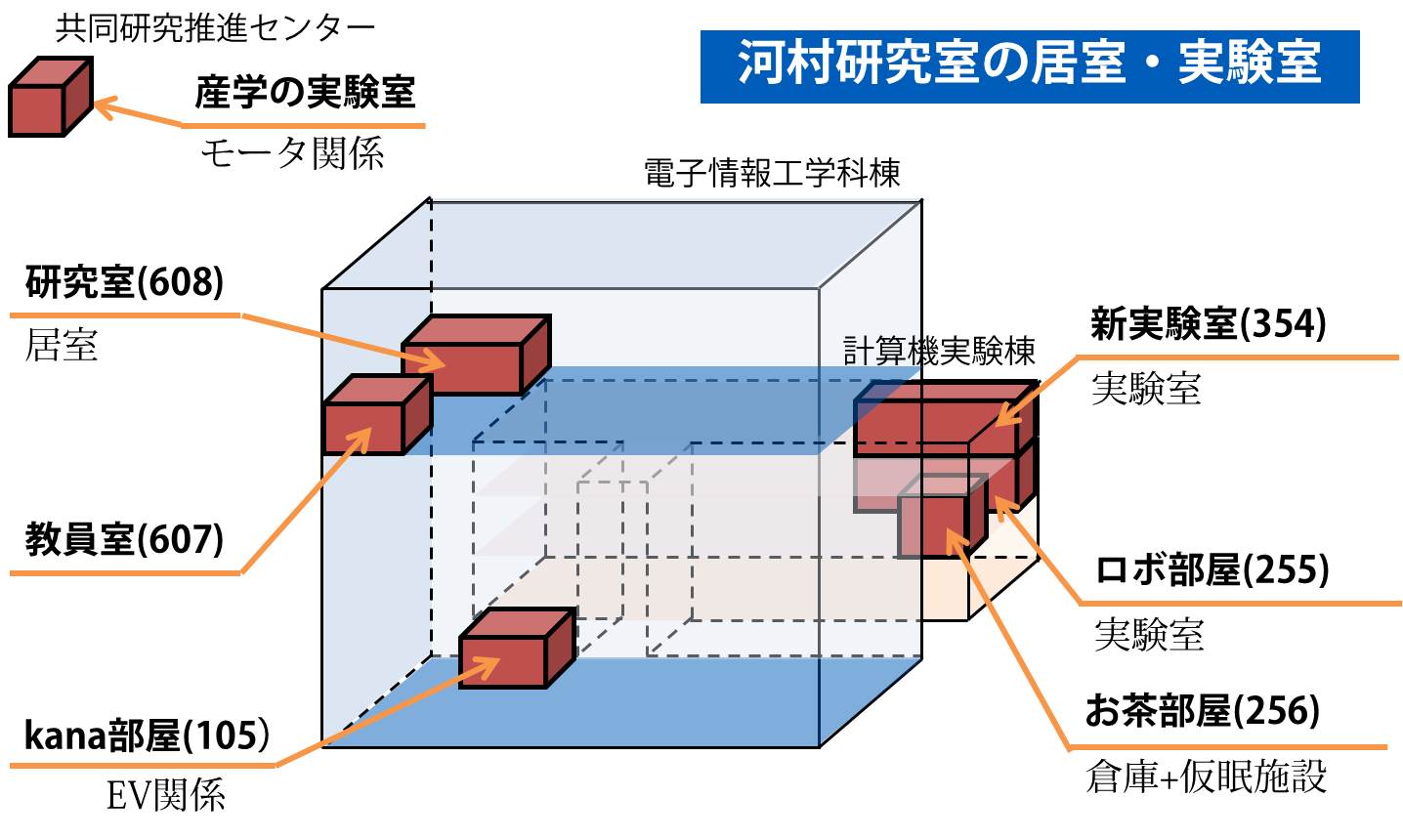
| 本研究室の実験は以下の4つの実験室(+準備室/居室)で行われます。 |
| |
1. |
「研究室」(電子情報工学科棟608号室);実験以外の時間はこの部屋で過ごしています。
|
| |
2. |
| 「KANA部屋」(電子情報工学科棟1階);主にKAST-EV(kana)の実験を行っています。3Dプリンタも設置されています。(写真は改装前) |
 |
|
| |
3. |
「ロボ部屋」(計算機棟2階);パワエレ関係の基礎的な実験や、2足歩行ロボット、非接触給電の研究を行っています。簡単な工作機械も設置されています。
|
| |
4. |
「産学の実験室」(共同研究推進センター内);主にモータ制御の実験を行っています。 |
| |
5. |
「新実験室」(計算機棟3F);アクチュエータ、非接触給電の実験を行っています。電磁界解析シミュレーション用PCも配置されています。下野研と合同で使用しています。 |


| |
|
|
| |
|